This is a bipedal robot capable of high-mobility maneuvers in an uncertain environment.
Reaction wheels are integrated into the body for persistent control torque independent of
foot contact.
The wheels store angular momentum allowing the robot to react to unexpected dynamics
such as external forces or sim-to-real differences even when no feet are on the ground.
My robot is controlled by a novel, contact-implicit model predictive controller.
A custom cost function balances path accuracy, reaction wheel saturation, and energy usage.
Robot dynamics are calculated with a custom, semi-rigid contact model.
An explicit contact sequence is not used; instead, contact is optimized alongside path
planning.
The solver chooses the contact sequence that minimizes the cost function, instead of a
predefined contact pattern.
The numerical optimization is performed by the Crocoddyl library's FDDP solver, though I am
working on a solver that is
explicitly designed around changing contact modes.
This is a solo project that I have been working on in my spare time for the last 1.5 years.
0.33x Speed
Chess Bot
Chess Bot is a controller that allows a Panda Arm to play chess.
It uses task space control for smooth and efficient motion planning.
Inverse dynamics of the arm are calculated at every step to generate feed-forward torques.
Real-time feedback loops make the controller robust to environmental uncertainty.
Grip is controlled using force feedback.
Stockfish integration gives the arm the optimal move to play.
A simple computer vision script estimates the board state using April tags on the pieces.
My Contribution
Designing the path planning algorithm
Feed-forward dynamics calculations
Object manipulation
Team size: 3
Gyro Cube
Gyro Cube is a cube-shaped robot controlled with internal gyroscopes similar to ETH
Zürich's Cubli.
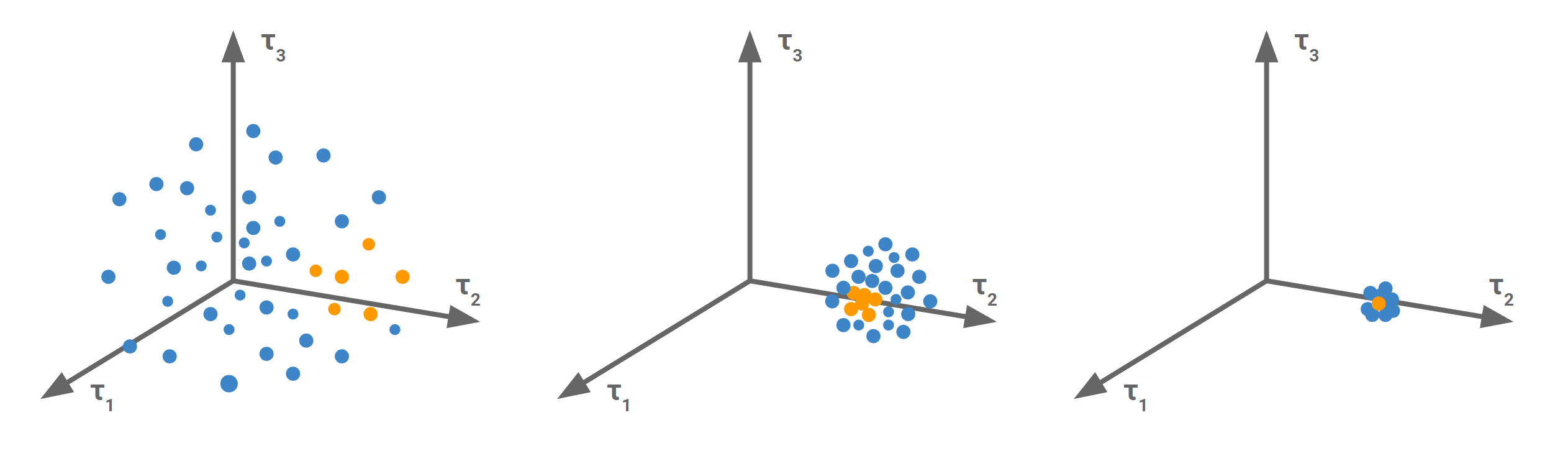
Cross-entropy policy search is used to efficiently compute the optimal trajectory for the
look-ahead period.
70 simulated rollouts estimate a gaussian fit of the cost function.
New control inputs are chosen by sampling this Gaussian distribution.
The sample converges to an optimal trajectory by iterating through these 2 steps.
A custom cost function rewards pose matching and efficient movement while penalizing
reaction wheel saturation.
My Contribution
Creating and optimizing the simulated rollout transition function
Implementing the cross-entropy search algorithm
Designing and tuning the reward functions
Team size: 3
Collaborative Robot
This collaborative controller runs a Trossen Robotics' Locobot to complete a simple
sorting task with other robots, without directly communicating.
Task:
Multiple robots are deployed onto a course scattered with many colored blocks (red,
yellow, green, and blue).
Three circles denote stations where specific block colors are to be gathered to fit
a given recipe.
The catch is that the recipes are not designated to a particular station, meaning
that robots must agree on which station gets which recipe without directly
communicating.
A custom perception algorithm takes depth camera data and detects blocks, their colors,
stations, and obstacles using a probabilistic occupancy grid.
The system tracks the state of the stations to observe how other robots place blocks.
This allows the controller to estimate what the other robots believe about the station
recipes and choose the block move that gives the highest expected value in the least amount
of time.
Drive paths are continuously calculated to avoid obstacles and other robots.
An arm controller uses the depth camera to locate, grab, and deposit blocks.
The suspension consists of a series of linkages that set the height of the rover's six
wheels
in response to changing terrain below the rover.
The linkages form a mechanical controller that optimizes the weight distribution between the
wheels to allow the rover to glide over large obstacles.
The mechanical advantage of the linkages change with height, allocating more weight
from lower- to higher-positioned wheels.
Weight is moved away from wheels that need to climb up an obstacle to wheels that have
already climbed that obstacle.
Unlike a spring-based suspension, this chassis has a well-constrained configuration for a
given
ground curvature.
Changing forces on the chassis do not induce movement in the suspension.
This results in a rigid platform for the arm to operate off of.
This chassis is an improvement on my 2019 chassis, which "carried" our rover to a 3rd place
finish internationally. The 2020 rover never got to compete, as the competition did not run
during the pandemic.
My Contribution
This is a novel suspension that I invented, designed, and fabricated.
While this rover was the work of a team, this chassis was solely my
responsibility.